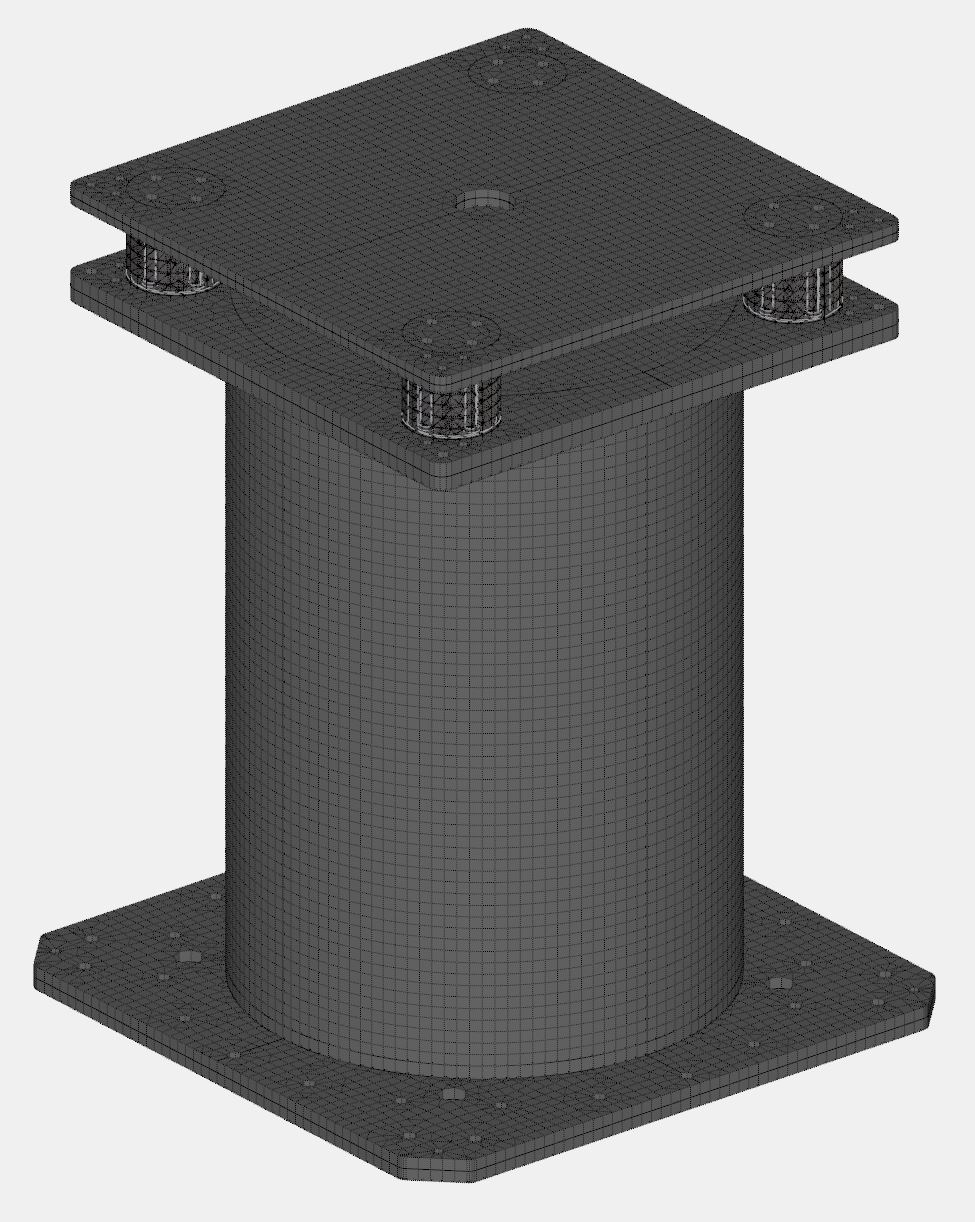
Tragwerke und Verankerungssysteme für Roboter
Verankerungssysteme für Roboter unterliegen dynamischen Beanspruchungen. Ab 10.000 Lastwechseln kommt es bei Stahl zu Ermüdungserscheinungen, so dass sich bei höheren Lastspielzahlen die Beanspruchbarkeit des Materials reduziert.
In Abhängigkeit vom Verankerungsgrund steht eine begrenzte Auswahl bauaufsichtlich zugelassener Verankerungssysteme zur Auswahl. Nach Wahl eines Verankerungssystems wird die Beanspruchbarkeit durch die möglichen Rand- und Achsabstände der Anker bestimmt.


Ankerprüfung
Zurück
Vor